Appearance
Y301-110/200/020 Technical Manual
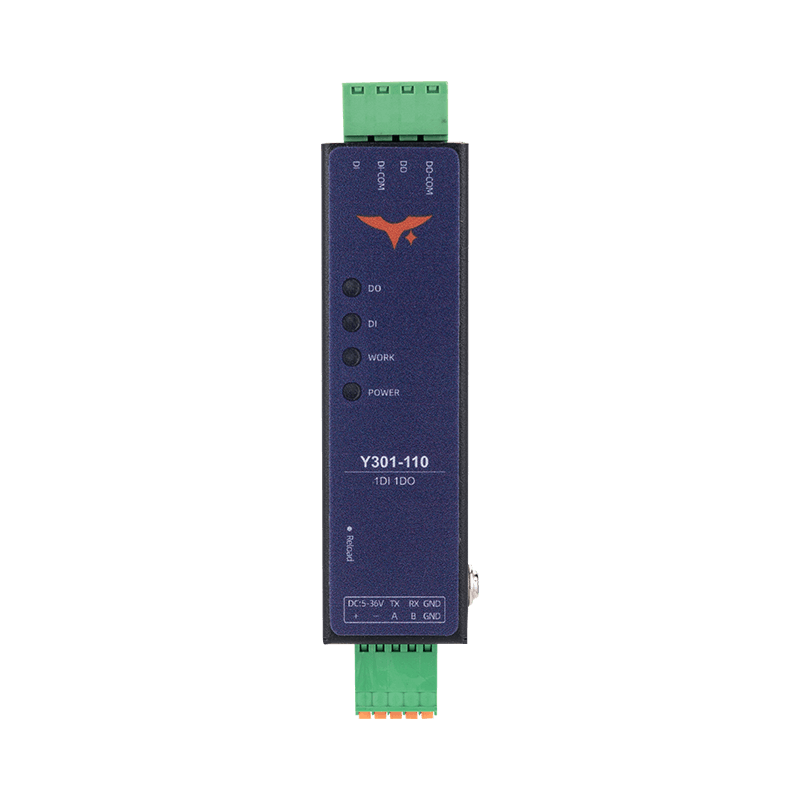
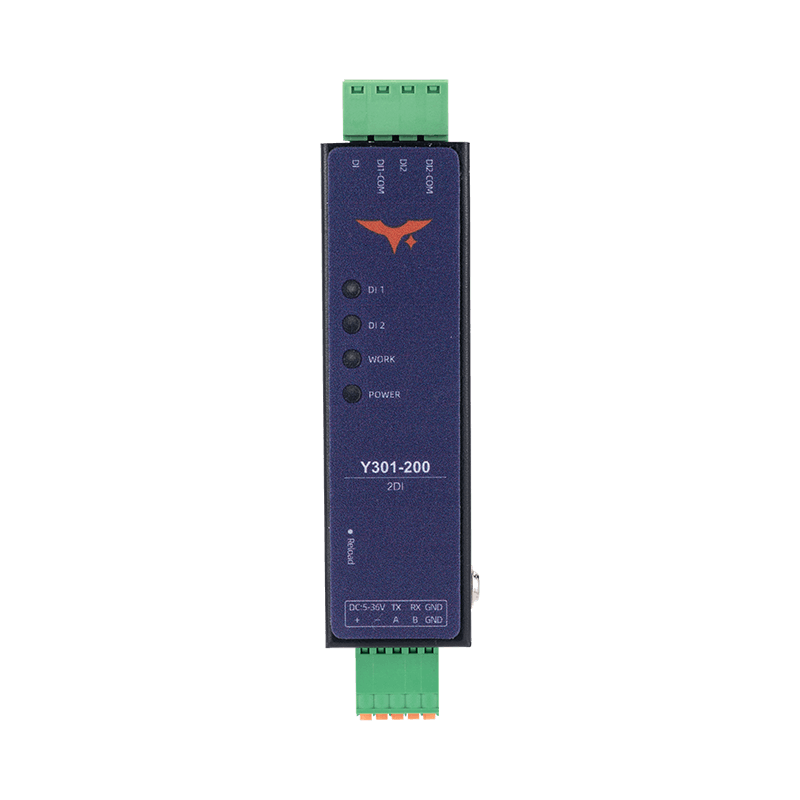
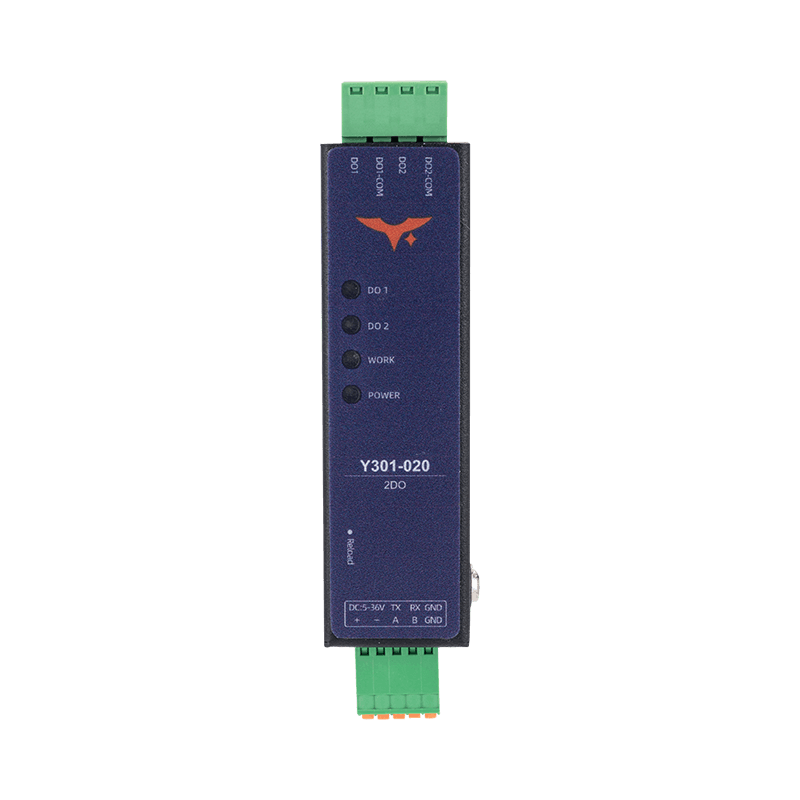
| Y301-110 | Y301-200 | Y301-020 |
|---|---|---|
 |  |  |
Contents
- Overview
- Default Settings
- Modbus Register Map (Modbus Address Only)
- Command Examples (CRC Included)
- Parameter Configuration
- Automation Rules
- Troubleshooting
1. Overview
This manual describes the Modbus RTU communication commands for the Y301-110, Y301-200, and Y301-020 I/O modules.
| Model | DI | DO | Description |
|---|---|---|---|
| Y301-110 | 1 | 1 | Single input + single relay |
| Y301-200 | 2 | 0 | Dual input monitoring |
| Y301-020 | 0 | 2 | Dual relay control |
Frame format: [slave address][function code][data][CRC low][CRC high]
The examples below use slave address 0x01. Replace it with the actual device address in your application.
2. Default Settings
| Parameter | Default |
|---|---|
| Slave address | 1 |
| Baud rate | 9600 bps |
| Data bits | 8 |
| Stop bits | 1 |
| Parity | None |
| Pulse counting edge | Rising edge (0x0041 = 1) |
| Pulse debounce | 50 ms (0x0042 = 50) |
3. Modbus Register Map (Modbus Address Only)
3.1 Digital Input (DI) - Function Code 0x02
| Channel | Modbus Address | Supported Models | R/W |
|---|---|---|---|
| DI1 | 0x0000 | Y301-110, Y301-200 | RO |
| DI2 | 0x0001 | Y301-200 | RO |
Return value: 0 = inactive, 1 = active.
3.2 Digital Output (DO) - Function Code 0x01/0x05/0x0F
| Channel | Modbus Address | Supported Models | R/W |
|---|---|---|---|
| DO1 | 0x0000 | Y301-110, Y301-020 | RW |
| DO2 | 0x0001 | Y301-020 | RW |
Write value: 0x0000 = open, 0xFF00 = closed.
3.3 Common Holding Registers - Function Code 0x03/0x06/0x10
| Modbus Address | Parameter | Bytes | R/W | Range / Enum | Default |
|---|---|---|---|---|---|
0x002A | Runtime slave address | 2 | RO | 0-255 | - |
0x003E | Slave address | 2 | RW | 1-255 | 1 |
0x003F | Broadcast mode | 2 | RW | 0/1/2 | 0 |
0x0041 | Pulse count edge | 2 | RW | 0/1 | 1 |
0x0042 | Pulse debounce (ms) | 2 | RW | 5-255 | 50 |
0x0055 | RTC Unix time | 4 | RW | uint32 | - |
0x0057 | Baud rate | 4 | RW | 600-230400 | 9600 |
0x0059 | Data bits | 2 | RW | 8 or 9 | 8 |
0x005A | Stop bits | 2 | RW | 1 or 2 | 1 |
0x005B | Parity | 2 | RW | 0/1/2 | 0 |
3.4 DI Pulse Counter Registers
| Channel | Modbus Address | Bytes | R/W | Supported Models | Description |
|---|---|---|---|---|---|
| DI1 count | 0x0500 (0x0500~0x0501) | 4 | RW | Y301-110, Y301-200 | Only 0 is allowed for write (clear) |
| DI2 count | 0x0502 (0x0502~0x0503) | 4 | RW | Y301-200 | Only 0 is allowed for write (clear) |
3.5 Automation Rule Register Groups
Rule groups = DO * 2:
| Model | DO Count | Rule Groups | Start Addresses |
|---|---|---|---|
| Y301-110 | 1 | 2 | 0x0080, 0x0088 |
| Y301-200 | 0 | 0 | N/A |
| Y301-020 | 2 | 4 | 0x0080, 0x0088, 0x0090, 0x0098 |
4. Command Examples (CRC Included)
Tip: command blocks include a built-in copy icon in VitePress.
4.1 Read Digital Inputs
| Operation | Request | Supported Models |
|---|---|---|
| Read DI1 | 01 02 00 00 00 01 B9 CA | Y301-110, Y301-200 |
| Read DI2 | 01 02 00 01 00 01 E8 0A | Y301-200 |
| Read DI1~DI2 in one shot | 01 02 00 00 00 02 F9 CB | Y301-200 |
4.2 Read Digital Output Status
| Operation | Request | Supported Models |
|---|---|---|
| Read DO1 | 01 01 00 00 00 01 FD CA | Y301-110, Y301-020 |
| Read DO2 | 01 01 00 01 00 01 AC 0A | Y301-020 |
| Read DO1~DO2 in one shot | 01 01 00 00 00 02 BD CB | Y301-020 |
4.3 Control Digital Outputs
| Operation | Request | Supported Models |
|---|---|---|
| Open DO1 | 01 05 00 00 00 00 CD CA | Y301-110, Y301-020 |
| Close DO1 | 01 05 00 00 FF 00 8C 3A | Y301-110, Y301-020 |
| Open DO2 | 01 05 00 01 00 00 9C 0A | Y301-020 |
| Close DO2 | 01 05 00 01 FF 00 DD FA | Y301-020 |
Multi-channel control (0x0F):
| Operation | Request | Supported Models |
|---|---|---|
| Close DO1 and DO2 together | 01 0F 00 00 00 02 01 03 9E 96 | Y301-020 |
| Open DO1 and DO2 together | 01 0F 00 00 00 02 01 00 DE 97 | Y301-020 |
4.4 Parameter Read/Write
| Operation | Request |
|---|---|
Read slave address (0x003E) | 01 03 00 3E 00 01 E5 C6 |
| Write slave address = 5 | 01 06 00 3E 00 05 28 05 |
Read baud rate (0x0057, 2 regs) | 01 03 00 57 00 02 75 DB |
Write baud rate = 115200 (0x0001C200) | 01 10 00 57 00 02 04 00 01 C2 00 B7 D5 |
Write 8N1 (0x0059~0x005B) | 01 10 00 59 00 03 06 00 08 00 01 00 00 85 EF |
4.5 DI Pulse Counter Read/Write
| Operation | Request | Supported Models |
|---|---|---|
Read DI1 count (0x0500, 2 regs) | 01 03 05 00 00 02 C4 C7 | Y301-110, Y301-200 |
Read DI2 count (0x0502, 2 regs) | 01 03 05 02 00 02 65 07 | Y301-200 |
| Clear DI1 count (write 0) | 01 10 05 00 00 02 04 00 00 00 00 CC FF | Y301-110, Y301-200 |
5. Parameter Configuration
5.1 Serial Settings
- Baud rate is a 32-bit value at
0x0057, use0x10to write 2 registers. - Data/stop/parity are located at
0x0059~0x005B. - Changing serial parameters or slave address requires reboot.
6. Automation Rules
Y301-110 supports DI -> DO local automation (1DI + 1DO).
Y301-200 has no DO, and Y301-020 has no DI, so local DI-triggered rules are not applicable.
6.1 Automation Register Map
Rules start at address 0x0080. Each rule uses 8 registers (16 bytes).
| Offset | Field | Description |
|---|---|---|
+0 | Mode | Rule type (see table below) |
+1 | Action | 0=open, 1=close, 2=toggle |
+2 | DO index | Target relay, starting from 1 |
+3 | Trigger index | Source DI, starting from 1 |
+4-5 | Parameter 1 | Mode-dependent, 32-bit |
+6-7 | Parameter 2 | Mode-dependent, 32-bit |
6.2 Rule Modes
| Mode | Name | Description |
|---|---|---|
| 1 | DI follow | DO follows DI in normal/inverse direction |
| 2 | Pulse output | DO returns after pulse duration |
| 3 | Delayed control | DO action executes after delay |
6.3 Rule Command Examples (Y301-110)
- Case 1: DI Follow (Mode 1): DO1 follows DI1
| Field | Value | Description |
|---|---|---|
| Mode | 0x0001 | DI follow |
| Action | 0x0001 | Forward follow |
| DO index | 0x0001 | DO1 |
| DI index | 0x0001 | DI1 |
| Parameter 1 | 0x00000000 | Not used |
| Parameter 2 | 0x00000000 | Not used |
text
01 10 00 80 00 08 10 00 01 00 01 00 01 00 01 00 00 00 00 00 00 00 00 CC FE- Case 2: Pulse Output (Mode 2): DO1 normally open, auto-recover after 500 ms close
| Field | Value | Description |
|---|---|---|
| Mode | 0x0002 | Pulse output |
| Action | 0x0000 | Normally open |
| DO index | 0x0001 | DO1 |
| DI index | 0x0000 | Not used |
| Parameter 1 | 0x000001F4 | 500 ms |
| Parameter 2 | 0x00000000 | Not used |
text
01 10 00 80 00 08 10 00 02 00 00 00 01 00 00 00 00 01 F4 00 00 00 00 88 7B7. Troubleshooting
| Symptom | Cause | Solution |
|---|---|---|
| No response | Wrong address or baud rate | Check settings and try broadcast address 0 |
| CRC error | Wiring issue or interference | Check RS485 polarity and add termination resistors |
| DO does not switch | Load exceeds rating | Reduce the load and verify contact ratings |
| DI always reads 0 | Wiring error | Check COM/DI wiring and input voltage |
LED Indicators
| LED | Status | Meaning |
|---|---|---|
| POWER | Solid on | Power is normal |
| TX | Flashing | Data is being transmitted |
| RX | Flashing | Data is being received |
| DI1/DI2 | On | Input is active |
| DO1/DO2 | On | Relay is closed |
- Manufacturer: Hunan YenGear Tech Co., Ltd.
- Email: [email protected]
- Website: www.yengear.com